Archived Movies
Cooperative Control with Radio Controlled Vehicles
Experimental Environment
This experiment is performed by Radio Controlled Vehicles.
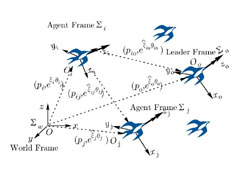 Pose Synchronization |
 Radio Controlled Vehicles (Kyosho mini-Z) |
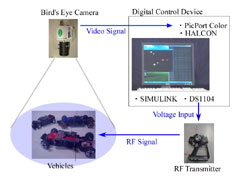 Experimental Environment |
| Vehicle | Kyosho mini-Z |
|---|---|
| Birds Eye Camera | komoto MTV-7310II |
| Image Processing Board | Leutron Vision PicPort-Color |
| Image Processing Software | MVTec Software GmbH HALCON |
| Digital Signal Processor | dSPACE DS1104 |
Experimental Results
| Experimental Result (Attitude Synchronization with Visual Motion Observer) |
 Experimental Result (Pose Synchronization with Visual Motion Observer) |
|
Experimental Result (Pose Synchronization 1) |
Experimental Result (Pose Synchronization 2) |
|
Experimental Result (Attitude Synchronization 1) |
Experimental Result (Attitude Synchronization 2) |
|
Experimental Result (Attitude Synchronization 3) |
Experimental Result (Attitude Synchronization 4) |
Coverage Control with NUVO
Experimental Environment
In this experiment, we use bipedal walking robots
|
Bipedal Motion |
 Experimental Environment |
Experimental Results
|
Experimental Result 1 |
Experimental Result 2 |
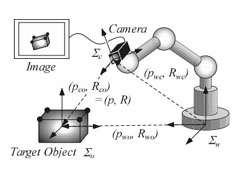
Visual Feedback 1
Images

|
|
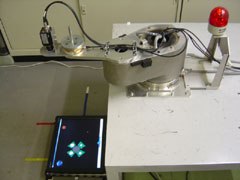
SICE DD Arm
|
Experimental Results
Visual Feedback 2
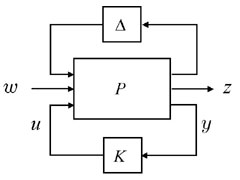
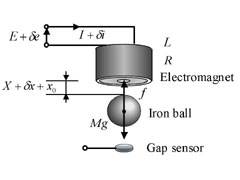
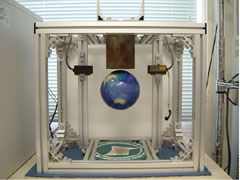
Robust Control
Images
|
|
|