舩田 陸
 次席研究員
次席研究員
理工学術院総合研究所,
早稲田大学.
Latest News:
- 2019/07/22: A paper is accepted as a regular paper in IEEE Transactions on Control Systems Technology.
- 2019/07/19: A paper is accepted in SICE Journal of Control, Measurement, and System Integration.
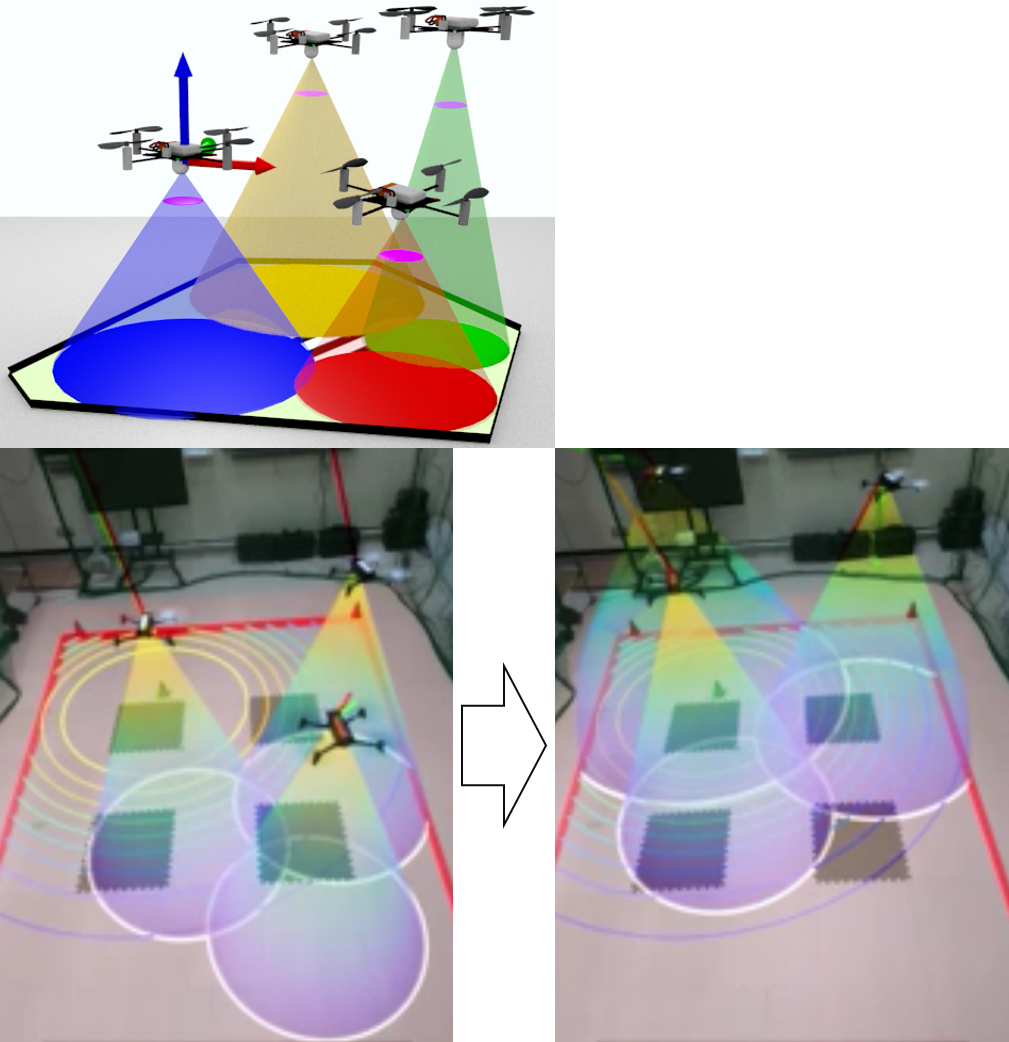

Visual Surveillance with PTZ Camera
How to cooperatively monitor dynamic targets, such as pedestrians, by cameras with controllable orientation?
Approach: Optimization on Manifolds and Density Estimation
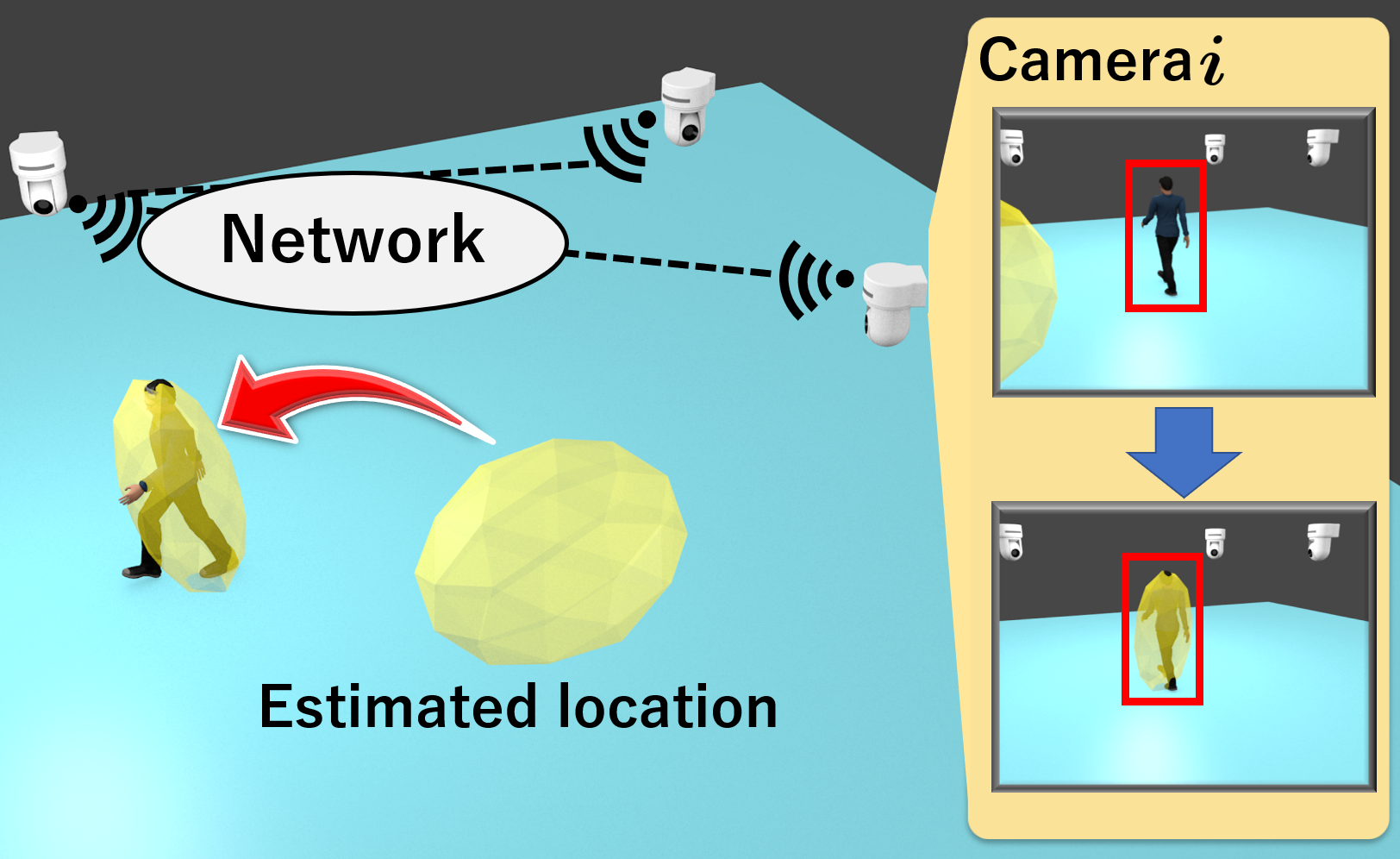
3-D Visual Human Localization
How to localize a pedestrian with cameras under the existence of obstacles which may cause occlusions?
Approach: Passivity based Distributed Optimization and Loop Shaping
業績
国際学術論文
-
T. Hatanaka, R. Funada and M. Fujita
"Visual Surveillance of Human Activities via Gradient-based Coverage Control on Matrix Manifolds"
IEEE Transactions on Control Systems Technology, accepted, 2019. -
A.W. Farras, T. Hatanaka, T.W. Nguyen, R. Funada, J. Yamauchi and M. Fujita
"Distributed Dynamic Reference Governor for Constrained Semi-Autonomous Robotic Swarms with Communication Delays and Experimental Verification"
SICE Journal of Control, Measurement, and System Integration, accepted, 2019. -
T. Hatanaka, Y. Wasa, R. Funada, A.G. Charalambides and M. Fujita
"A Payoff-based Learning Approach to Cooperative Environmental Monitoring for PTZ Visual Sensor Networks"
IEEE Transactions on Automatic Control, Vol. 61, No. 3, pp. 709-724, 2016.
(DOI:10.1109/TAC.2015.2450611, Downloadable at arXiv:1302.2017)
国内学術論文
-
舩田 陸, 山下 駿野, 畑中 健志, 藤田 政之
"受動性に基づく分散協調型3次元視覚人間位置推定アルゴリズム"
("Passivity-Based Distributed 3-D Visual Human Localization Algorithm")
計測自動制御学会論文集, Vol. 54, No. 6, pp. 547-556, 2018.
(DOI: 10.1115/sicetr.54.547) -
舩田 陸, 畑中 健志, 藤田 政之
"SO(3)上の勾配法に基づく協調視覚環境モニタリング"
("Cooperative Visual Environmental Monitoring: A Gradient Descent Approach on SO(3)")
計測自動制御学会論文集, Vol. 51, No. 3, pp. 139-147, Mar 21, 2015.
(DOI:10.9746/sicetr.51.139)
国際会議論文
-
R. Funada, M. Santos, J. Yamauchi, T. Hatanaka, M. Fujita and M. Egerstedt
"Visual Coverage Control for Teams of Quadcopters via Control Barrier Functions"
Proc. of 2019 International Conference on Robotics and Automation (ICRA), pp. 3010-3016, 2019. -
M.W.S. Atman, K. Noda, R. Funada, J. Yamauchi, T. Hatanaka and M. Fujita
"On Passivity-Shortage of Human Operators for A Class of Semi-autonomous Robotic Swarms"
Proc. of 2nd IFAC Conference on Cyber-Physical & Human Systems, pp. 21-27, 2018. (DOI:10.1016/j.ifacol.2019.01.008) -
T. Hatanaka, R. Funada, G. Gezer and M. Fujita
"Distributed Visual 3-D Localization of A Human Using Pedestrian Detection Algorithm: A Passivity-Based Approach"
Proc. of 6th IFAC Workshop on Distributed Estimation and Control in Networked Systems (NecSys),
IFAC-PapersOnLine, Vol. 49, No. 22, pp. 210-215, 2016. (DOI:10.1016/j.ifacol.2016.10.398) -
M. Forstenhaeusler, R. Funada, T. Hatanaka and M. Fujita
"Experimental Study of Gradient-Based Visual Coverage Control on SO(3) Toward Moving Object/Human Monitoring"
Proc. of 2015 American Control Conference, pp. 2125-2130, 2015. (DOI:10.1109/ACC.2015.7171047) -
T. Hatanaka, R. Funada and M. Fujita
"3-D Visual Coverage Based on Gradient Descent Algorithm on Matrix Manifolds and Its Application to Moving Objects Monitoring"
Proc. of 2014 American Control Conference, pp. 2125-2130, 2015. (DOI:10.1109/ACC.2014.6858663)
国内学会発表
-
舩田 陸, 藤田 哲平, 畑中 健志, 藤田 政之
"ズーム動作を考慮した勾配法に基づく協調視覚環境モニタリング"
SICE 第2回 制御部門マルチシンポジウム, PS-43, 2015.
SICE 制御部門研究奨励賞学生ポスターセッション優秀発表賞受賞 -
舩田 陸, 畑中 健志, 藤田 政之
"行列多様体上の勾配法に基づく協調視覚環境モニタリング"
SICE 第1回 制御部門マルチシンポジウム, PS-24, 2014.
採用 & 受賞
-
三豊科学技術振興協会より,ICRA 2019 参加のための海外渡航費助成
(2019年5月) -
日本学術振興会特別研究員に採用 (DC1)
(2016年4月 - 2019年3月) -
東京工業大学 工系国際連携室より下記の海外研究活動における海外渡航費助成
(ジョージア工科大学において, Magnus Egerstedt 教授の研究グループとの共同研究, 2018年6月 - 2018年11月) -
日本学生支援機構大学院第一種奨学金返還全額免除
(2014年4月 - 2016年3月) -
東京工業大学 機械制御システム専攻 副総代
(2016年3月) -
日本機械学会三浦賞
(2016年3月) -
東京工業大学基金奨学金 「130周年記念博士進学エンカレッジ奨学金」の奨学生として採用
(2015年10月) -
Tokyo Tech & UC Santa Barbara Student Workshop参加者として採用
(2015年8月) -
MATLAB TAに採用(東京工業大学大学院で2名が書類審査及び面接試験により選抜される)
(2015年4月) -
SICE 制御部門研究奨励賞学生ポスターセッション優秀発表賞
"ズーム動作を考慮した勾配法に基づく協調視覚環境モニタリング" (2015年3月)
海外での研究歴
-
Magnus Egerstedt
教授の研究グループとの共同研究, 2018年6月 - 2018年11月.
本研究成果はICRA 2019に採録されました.
Blog: Georgia Tech 滞在記.
略歴
Education
-
東京工業大学 工学院 システム制御系 システム制御コース 博士後期課程 修了 (2019年3月).
指導教員: 藤田 政之 教授.
副指導教員: 畑中 健志 准教授. -
東京工業大学大学院 理工学研究科 機械制御システム専攻 博士前期課程 修了 (2016年3月).
指導教員: 藤田 政之 教授.
副指導教員: 畑中 健志 准教授. -
東京工業大学 工学部 制御システム工学科 卒業 (2014年3月).
指導教員: 藤田 政之教授.
Teaching Assistant
連絡先
-
Address
〒169-8555 東京都新宿区大久保 3-4-1
早稲田大学 55号館 S棟 09-04B号室 -
Email
funada _at_ aoni.waseda.jp -
Phone
03-5286-3140