Omni-directional Mobile Robot
This page summarizes experimental environments used for a variety of experiments and bases of control algorithm for the omni-directional mobile robot.
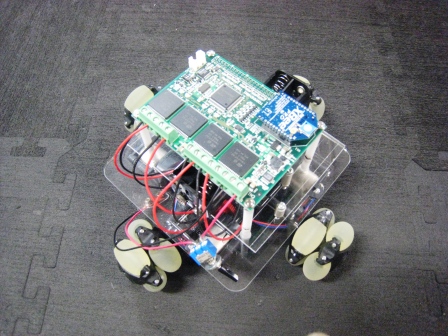
Omni-directional Mobile Robot
As an actuator, four motors are attached to the bottom part of the body, and they drive the connecting wheel independently. A CPU board (SH micro computer) and a motor driver are attached to the body.
 Omni-directional Mobile Robot |
Experimental System
The total system is illustrated by the following figure.
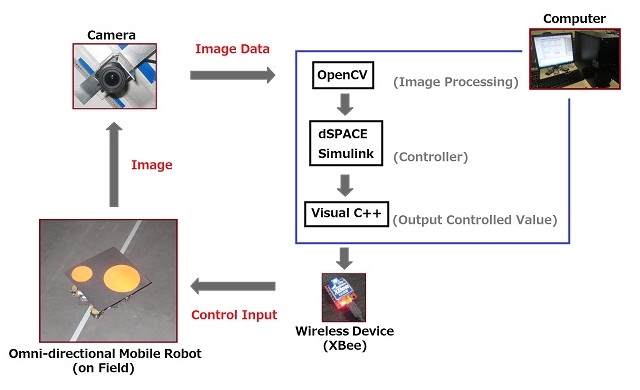
A USB camera (Firefly MV FMVU-03MTC) is attached to the ceiling above the robots on the field. The captured image signals are forwarded to a computer through a cable and are used in real time to extract the position and orientation with image processing software OpenCV. The sampling period of the controller and the frame rate provided by the camera are about 0.1[s] and 10 [fps], respectively. Based on the information, the computer calculates a desirable control input and send it to the robots.
Experiment 1 (PI Velocity Control)
In this experiment, we evaluate the performance using PI velocity Controller for stabilization.
 Bode Plot of open loop for PI controller |
 Step Response on simulation |
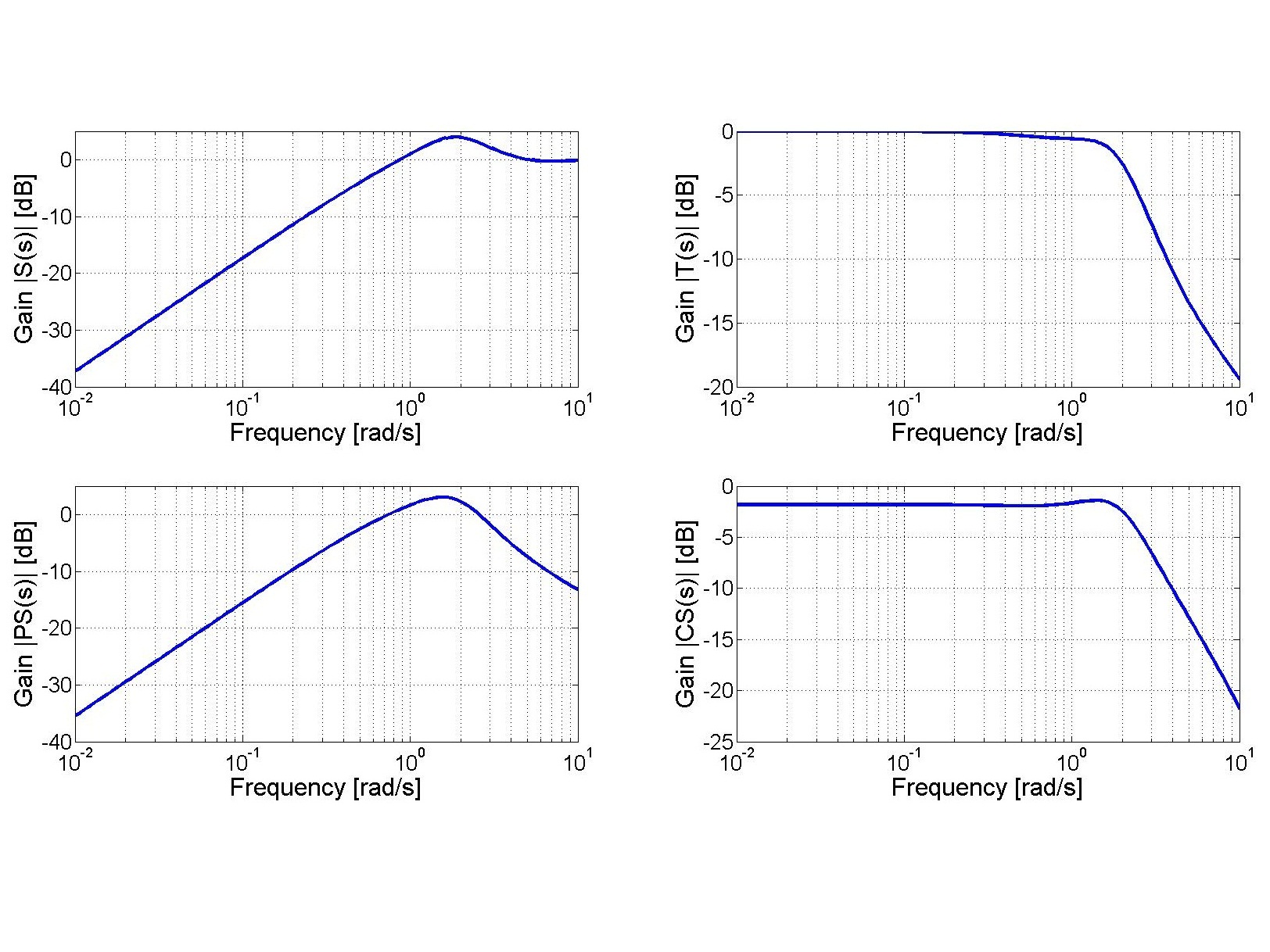 Gang of Four for PI controller |
|
Experimental Result |
Experiment 2 (2DOF Velocity Control)
In this experiment, we evaluate the performance using Feedforward Velocity Controller in addition to PI Feedback Velocity Controller for stabilization. The Feedforward Velocity Controller is designed in two ways: (1) one with Transfer functions and (2) one using signals generated with State Feedback.
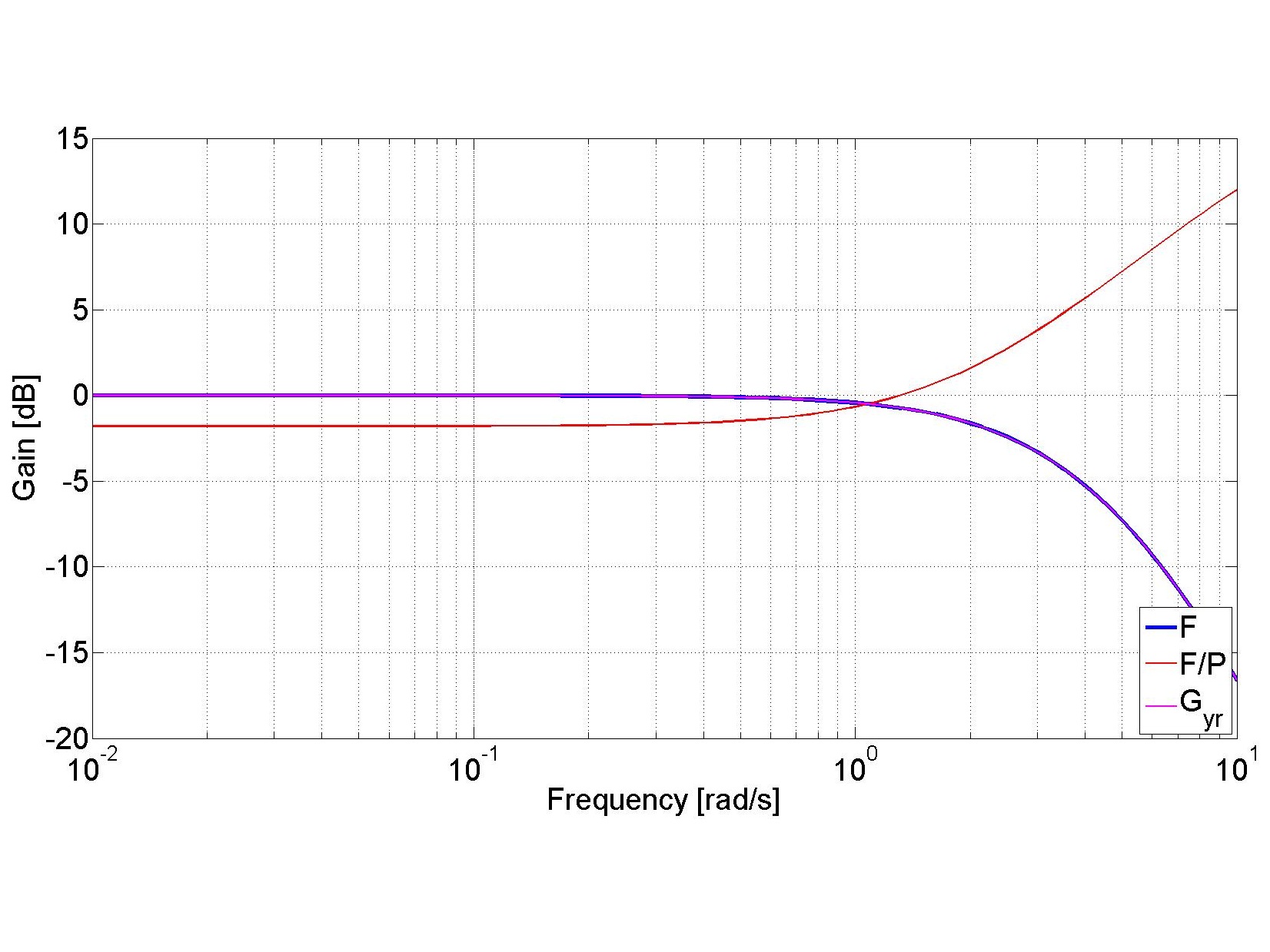 Gain Plot for Tuned Controller in Situation 1 |
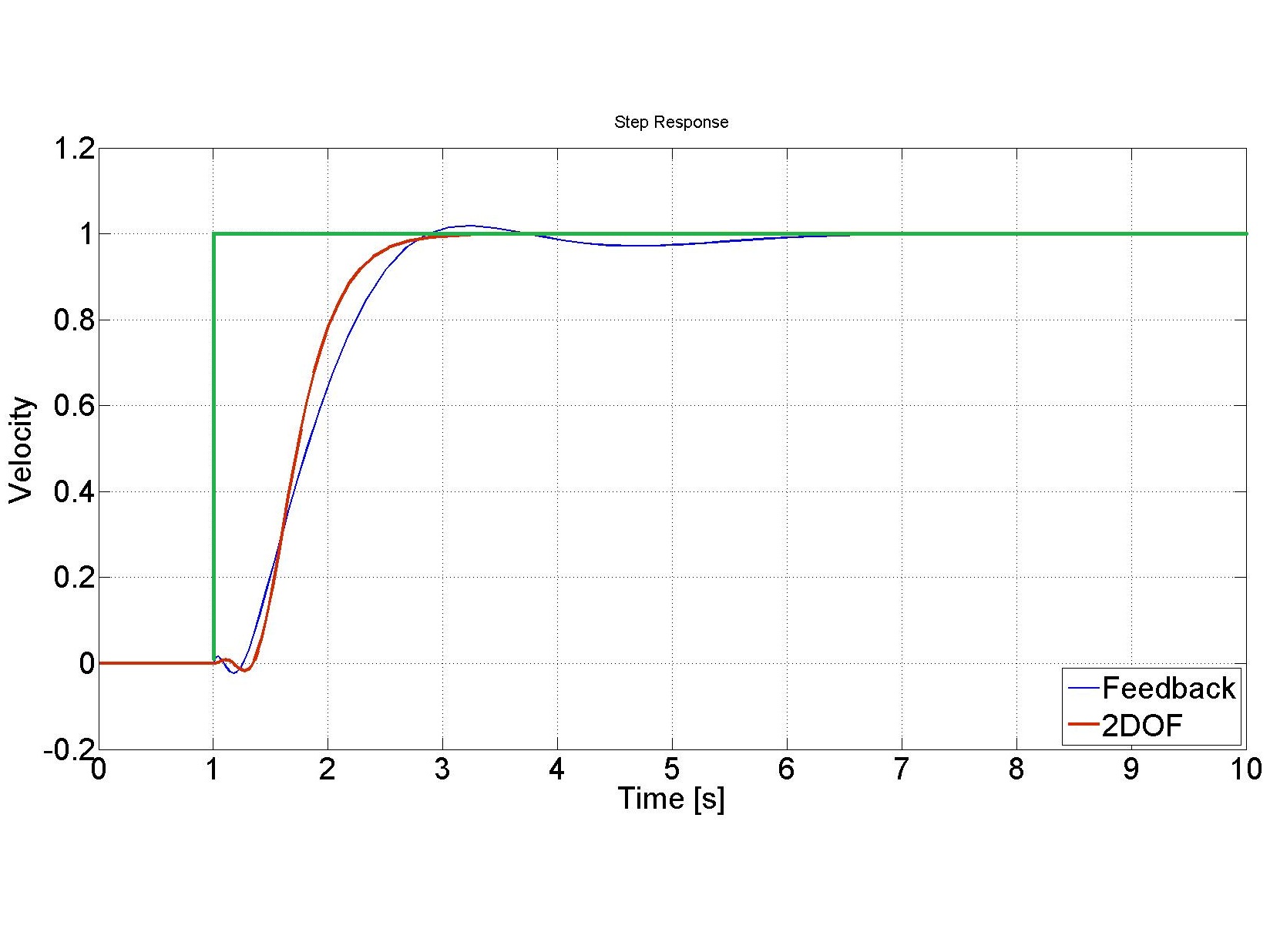 Step Response on simulation in Situation 1 |
|
Experimental Result (Situation 1) |
Experimental Result (Situation 2) |
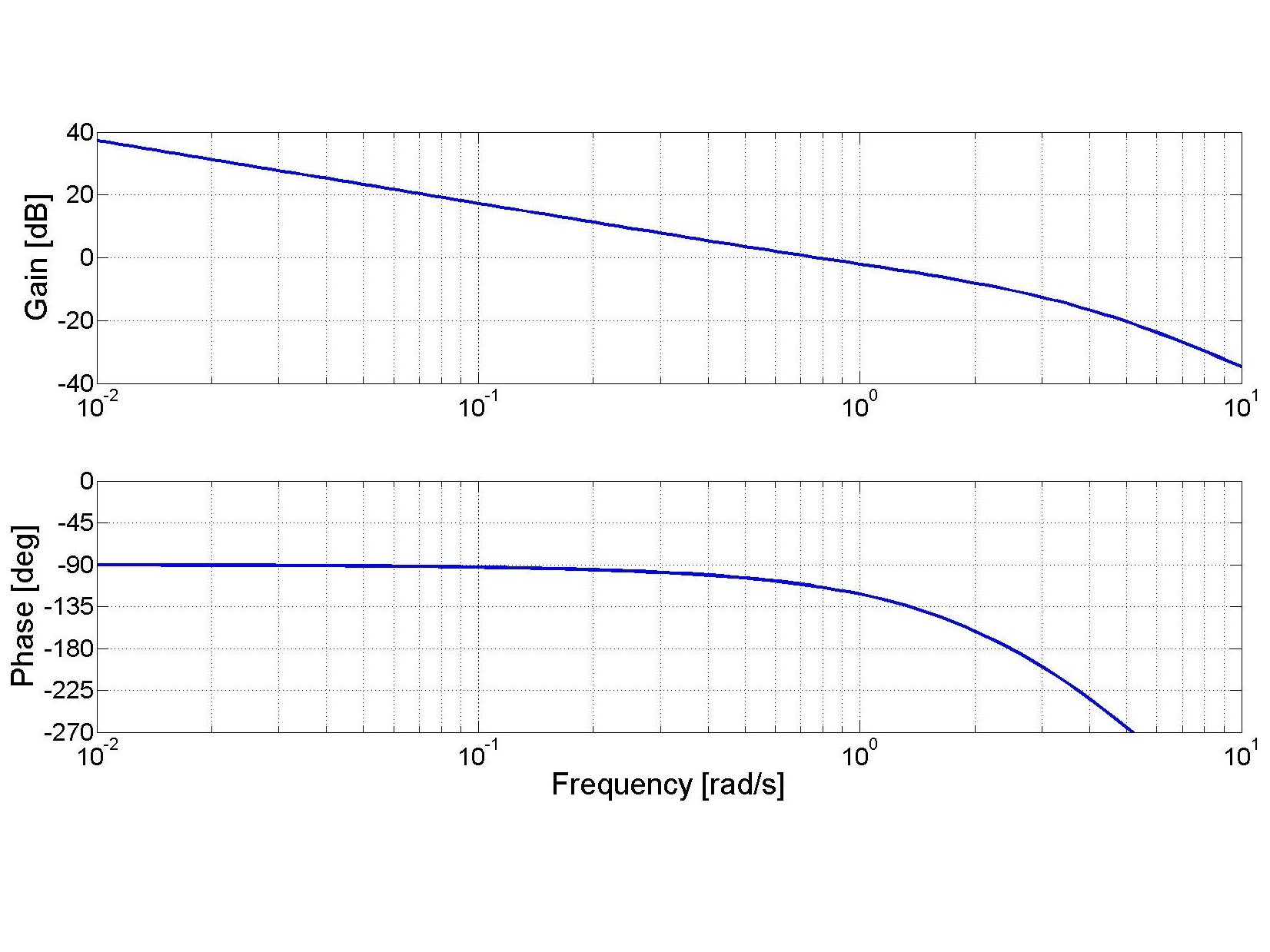
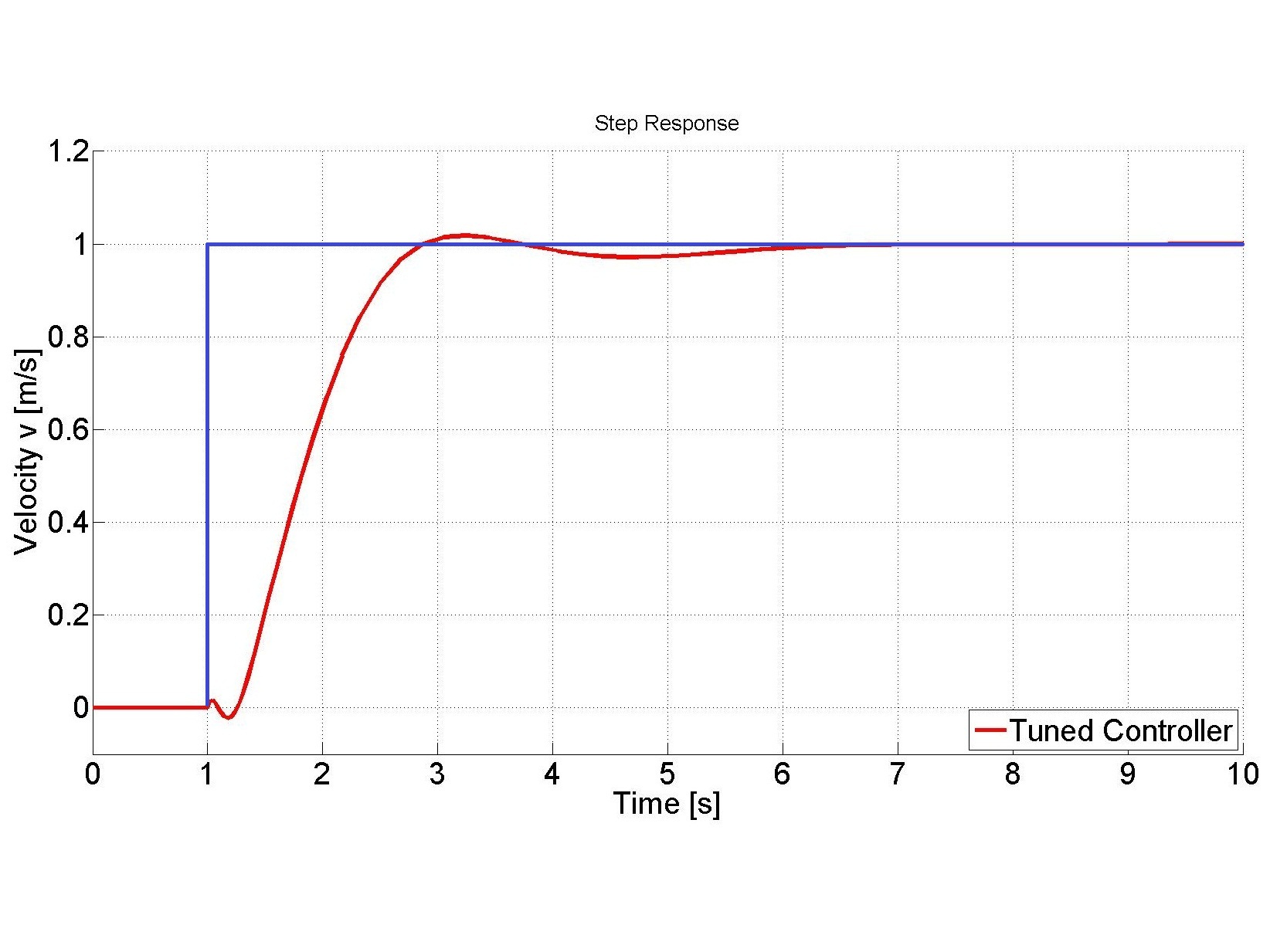
Experiment 3 (P Position Control)
In this experiment, we evaluate the performance using P position Controller in addition to PI Feedback Velocity Controller for stabilization.
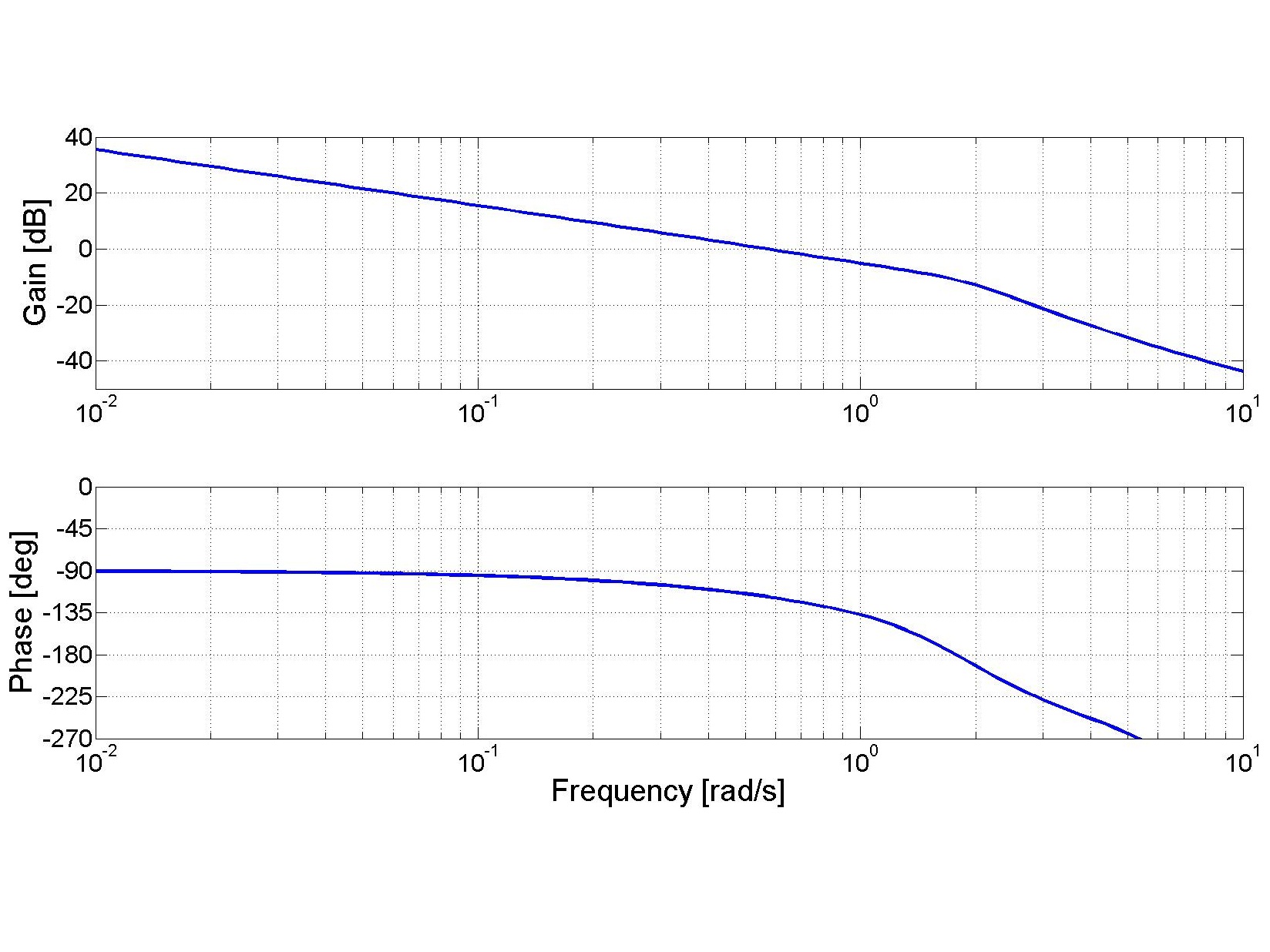 Bode Plot of open loop for Tuned Controller |
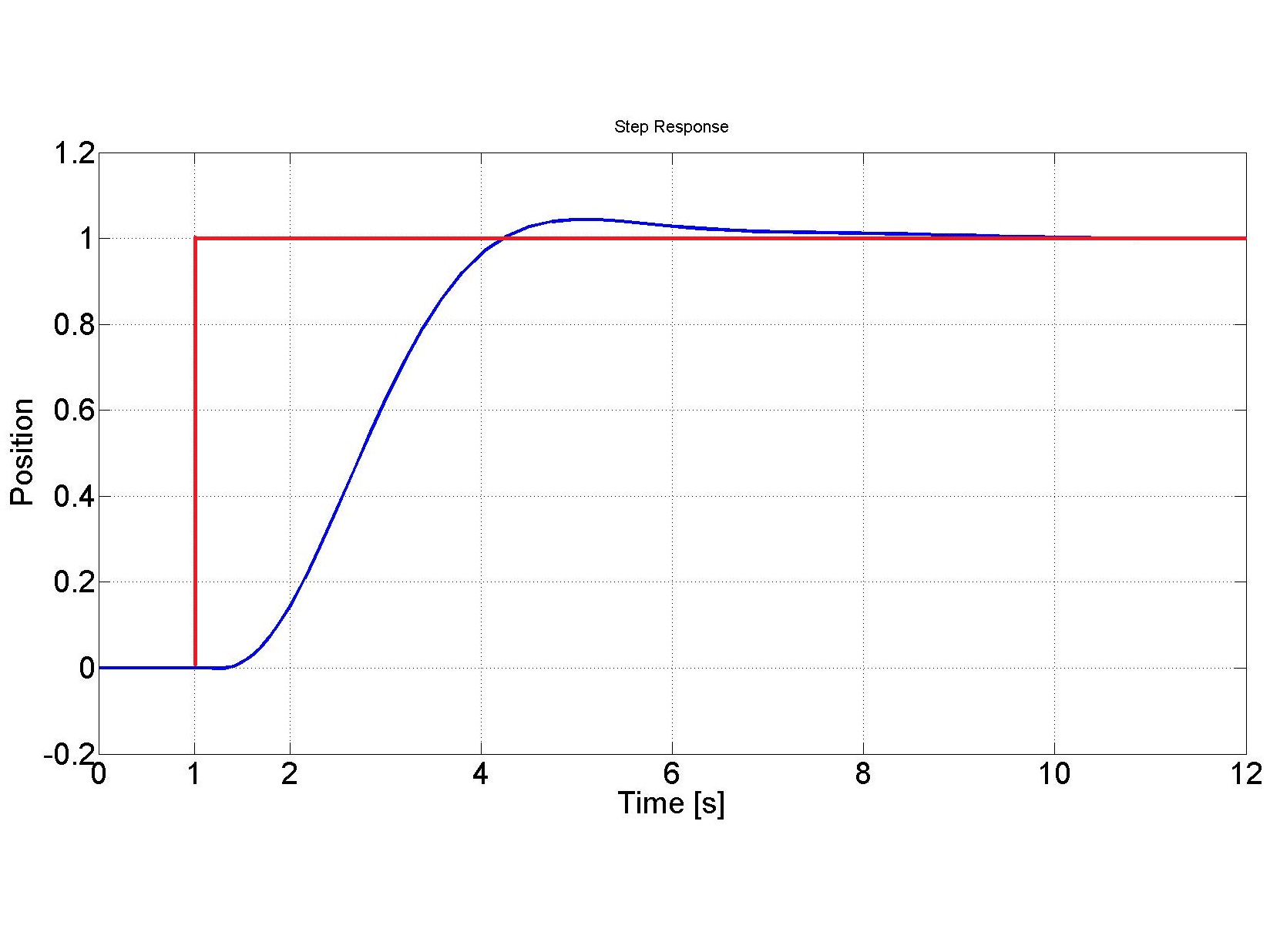 Step Response on simulation |
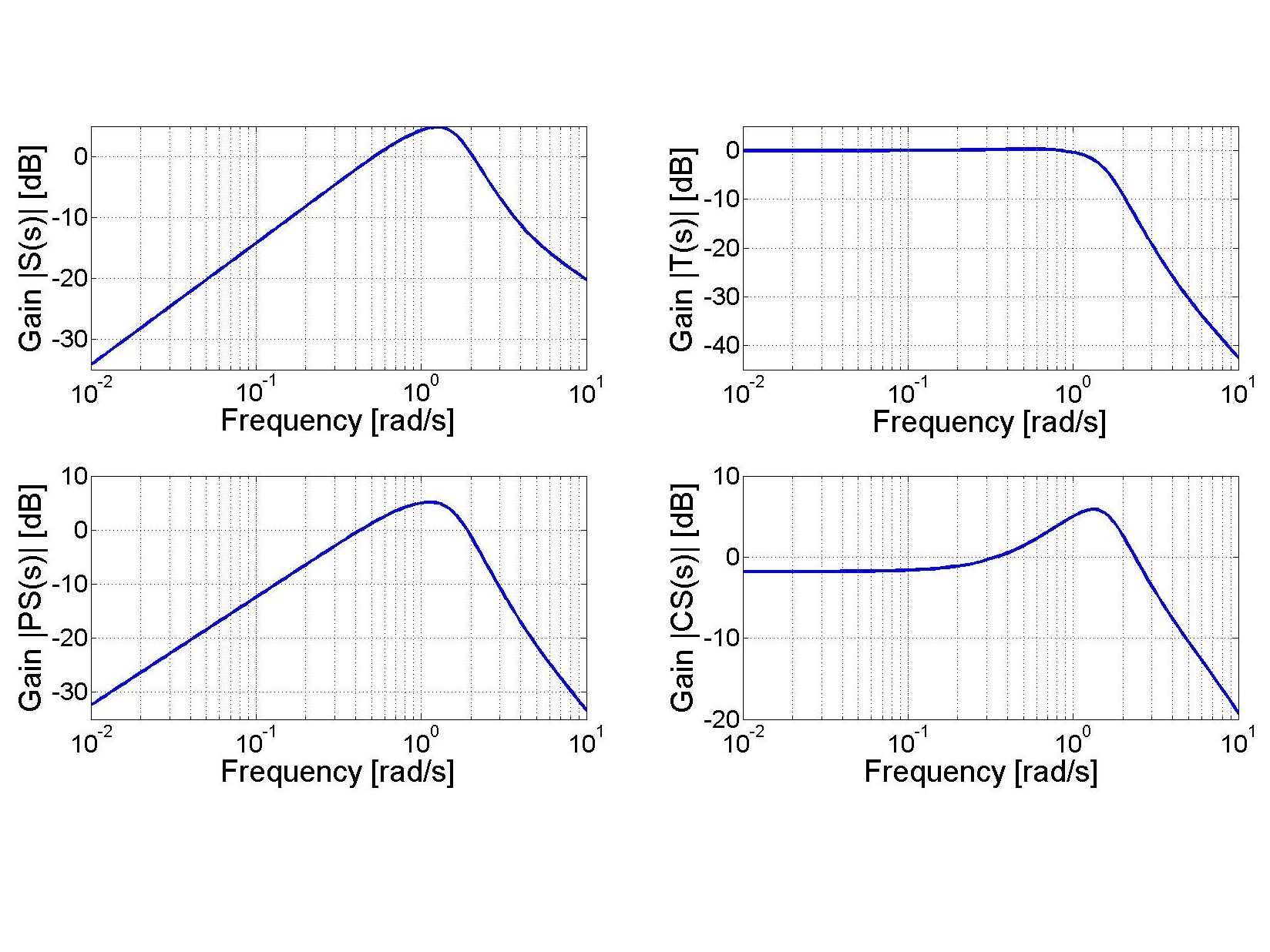 Gang of Four for Tuned Controller |
|
Experimental Result |
Experiment 4 (Velocity and Position Control with MPT)
In case of controlling the robot in a target position with a single Feedforward Controller, depending on input waveform, its behavior overshoots the target position.
In this experiment, we evaluate the performance using Feedforward Controller applying hybrid predictive control with Multi-Parametric Toolbox (MPT) in addition to PI Feedback Velocity Controller and P Feedback Position Controller ensuring stability.
|
Experimental Result |
Experiment 5 (Cooperative Control : Adaptive Cruise Control)
Adaptive cruise control is a system which controls a relative distance and velocity from a forward vehicle. The system is fascinated with the congestion aviodance. The purpose is to realize a autonomous-distributed system which achieves driving such as minimizing a crash risk.
In this experiment, we control four vehicles with one of control indexes, String Stability. Sufficient Condition of String Stability means that the pertubation doesn't propagate to following vehicles.
|
Experimental Result |